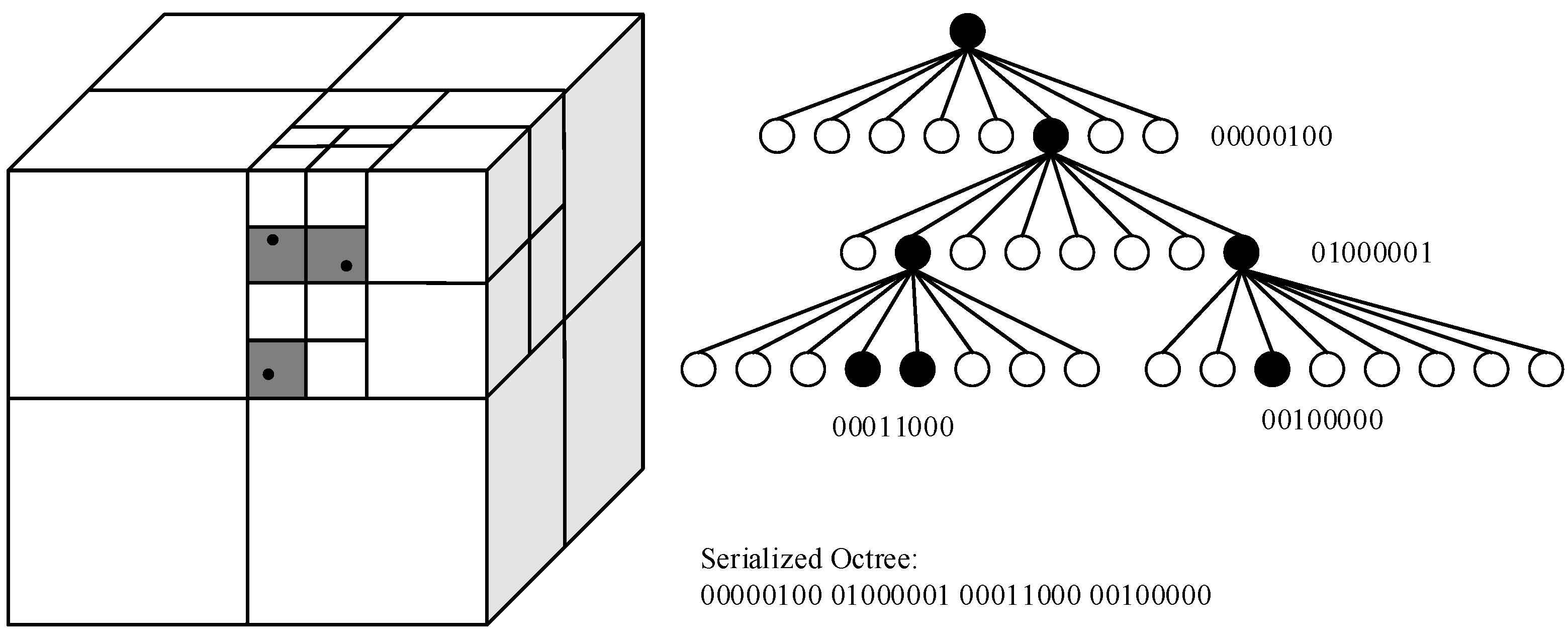
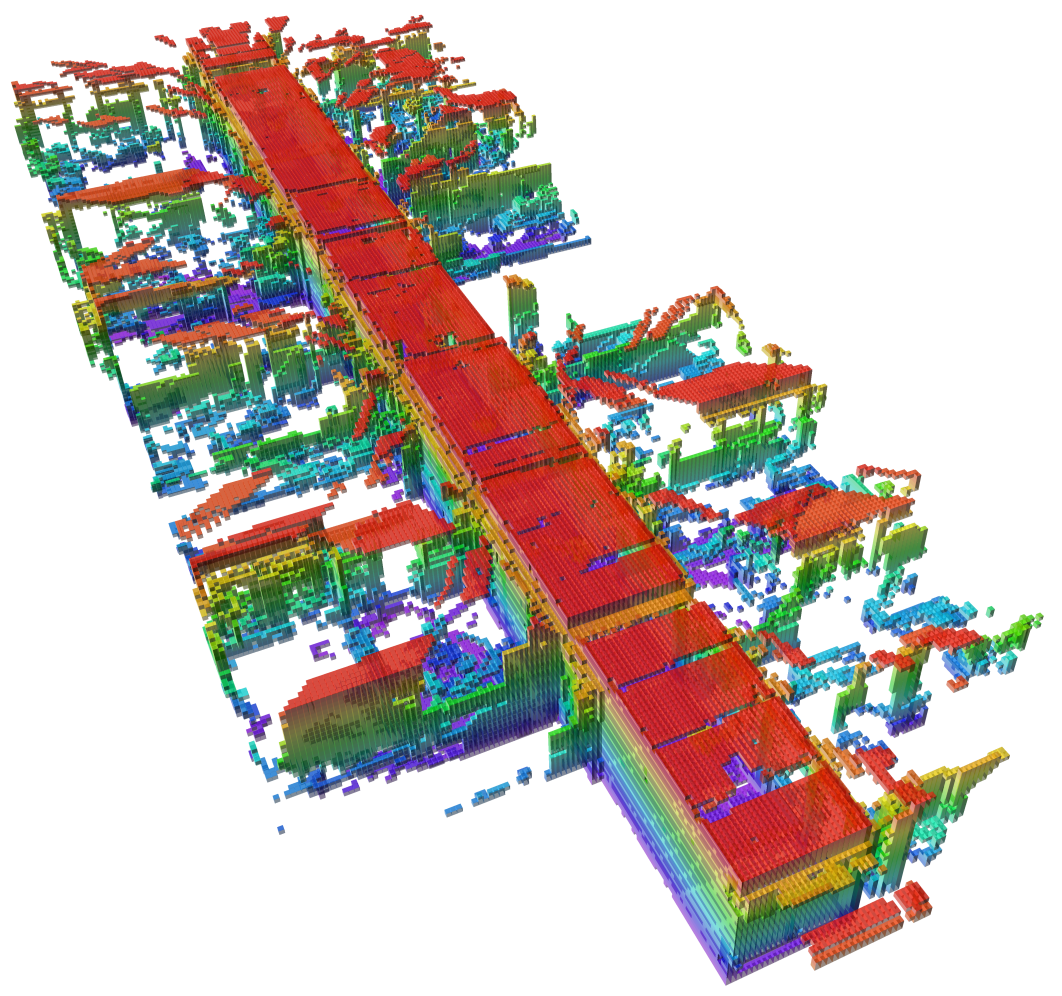
octomap an efficient probabilistic 3d mapping framework based on octrees
Most MAVs rely mainly on cameras for buliding a map of the 3D environment. OctoMap An Efficient Probabilistic 3D Mapping Framework Based on Octrees.
Sensors Free Full Text Embedded Processing And Compression Of 3d Sensor Data For Large Scale Industrial Environments Html
The OctoMap library implements a 3D occupancy grid mapping approach providing data structures and mapping algorithms in C particularly suited for robotics.
. An Efficient Probabilistic 3D Mapping Framework Based on Octrees journal Autonomous Robots year 2013 url. The map implementation is based on an octree and is designed to meet the following requirements. Micro aerial vehicles MAVs are an excellent platform for autonomous exploration.
- GitHub - OctoMapoctomap. An Efficient Probabilistic 3D Mapping Framework Based on Octrees. An Efficient Probabilistic 3D Mapping Framework Based on Octrees by A.
Contains the main OctoMap library the viewer octovis and dynamicEDT3D. A probabilistic flexible and compact 3D map representation for robotic systems. Therefore vision-based MAVs require an efficient exploration algorithm to select viewpoints that.
Octomap_server loads a 3D map as Octree-based OctoMap and distributes it to other nodes in a compact binary format. Contains the main OctoMap library the viewer octovis and dynamicEDT3D. An Efficient Probabilistic 3D Mapping Framework Based on Octrees.
An efficient probabilistic 3D mapping framework based on octrees Hornung Armin and Wurm Kai M and Bennewitz Maren and Stachniss Cyrill and Burgard Wolfram Autonomous Robots 2013.
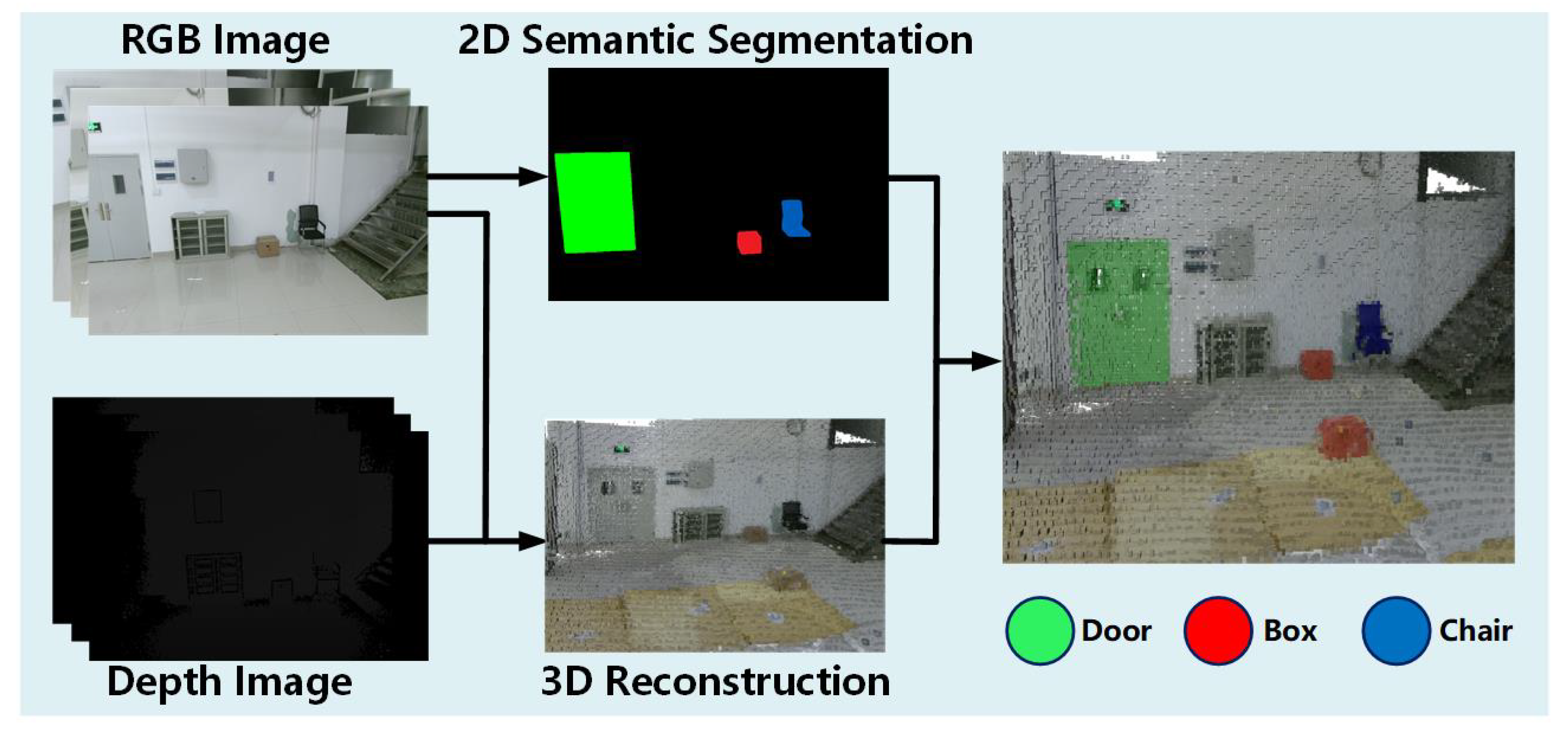
Machines Free Full Text Rtsdm A Real Time Semantic Dense Mapping System For Uavs Html
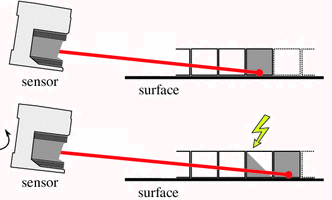
Figure 10 Octomap An Efficient Probabilistic 3d Mapping Framework Based On Octrees Springerlink

An Occupancy Grid Map Of A Fish Cage In Octomap A Probabilistic 3d Download Scientific Diagram

Figure 1 From Octomap A Probabilistic Flexible And Compact 3 D Map Representation For Robotic Systems Semantic Scholar
Octomap 3d Occupancy Mapping

Pdf Octomap A Probabilistic Flexible And Compact 3d Map Representation For Robotic Systems

Comparative Analysis Of Octomap And Rtabmap For Multi Robot Disaster Site Mapping Semantic Scholar
Octomap Readme Md At Devel Octomap Octomap Github

Octomap Explanierend Robotics With Ros

Create 3 D Occupancy Map Matlab
2

Octree Maps 2010 2013 Youtube
Octomap 3d Occupancy Mapping

Pdf Octomap A Probabilistic Flexible And Compact 3 D Map Representation For Robotic Systems Semantic Scholar
2
2
Figure 13 Octomap An Efficient Probabilistic 3d Mapping Framework Based On Octrees Springerlink
Octomap 3d Occupancy Mapping
Sensors Free Full Text An Occupancy Mapping Method Based On K Nearest Neighbours Html